
Rubble Rescue Robot
Abstract:
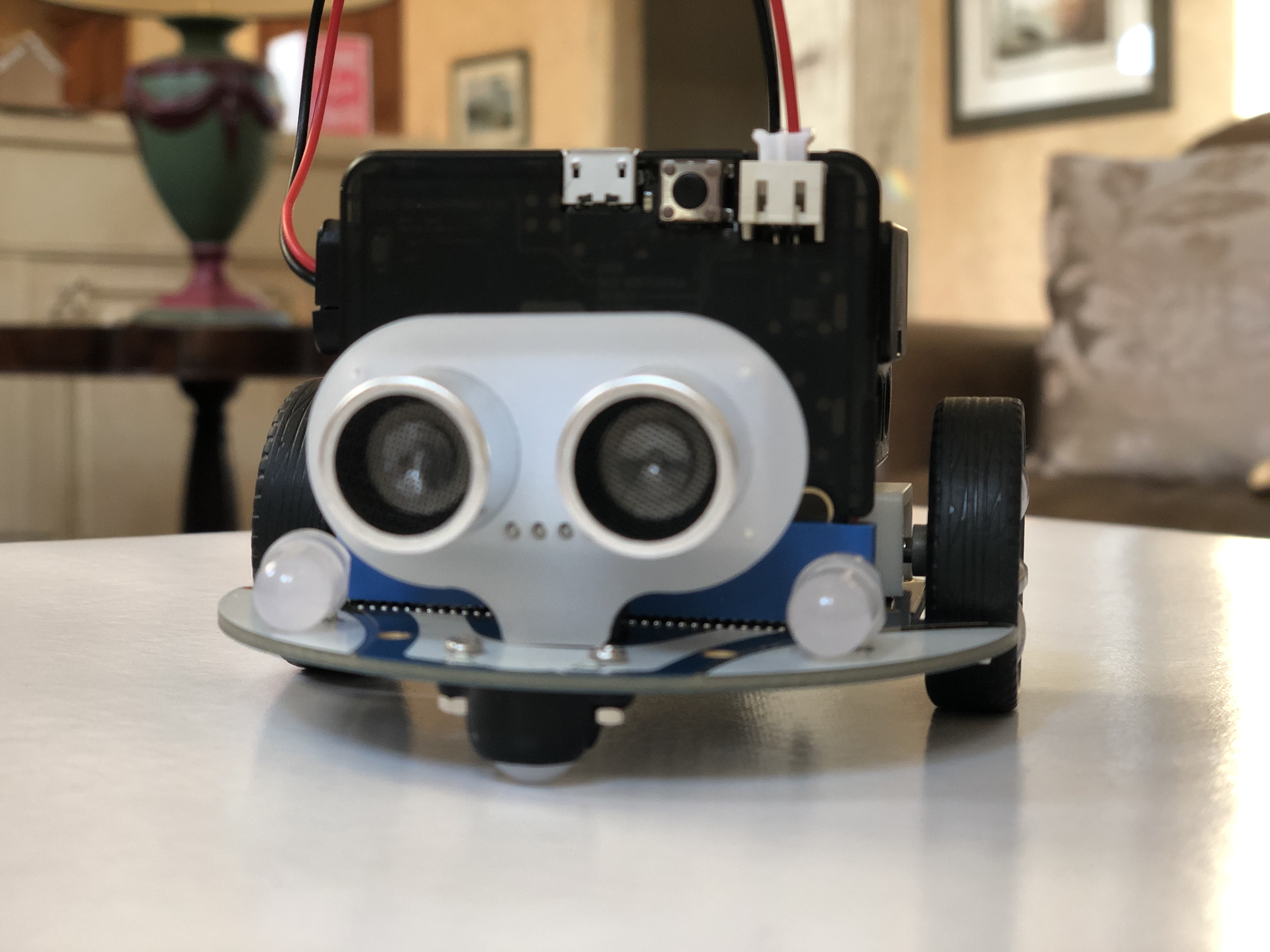
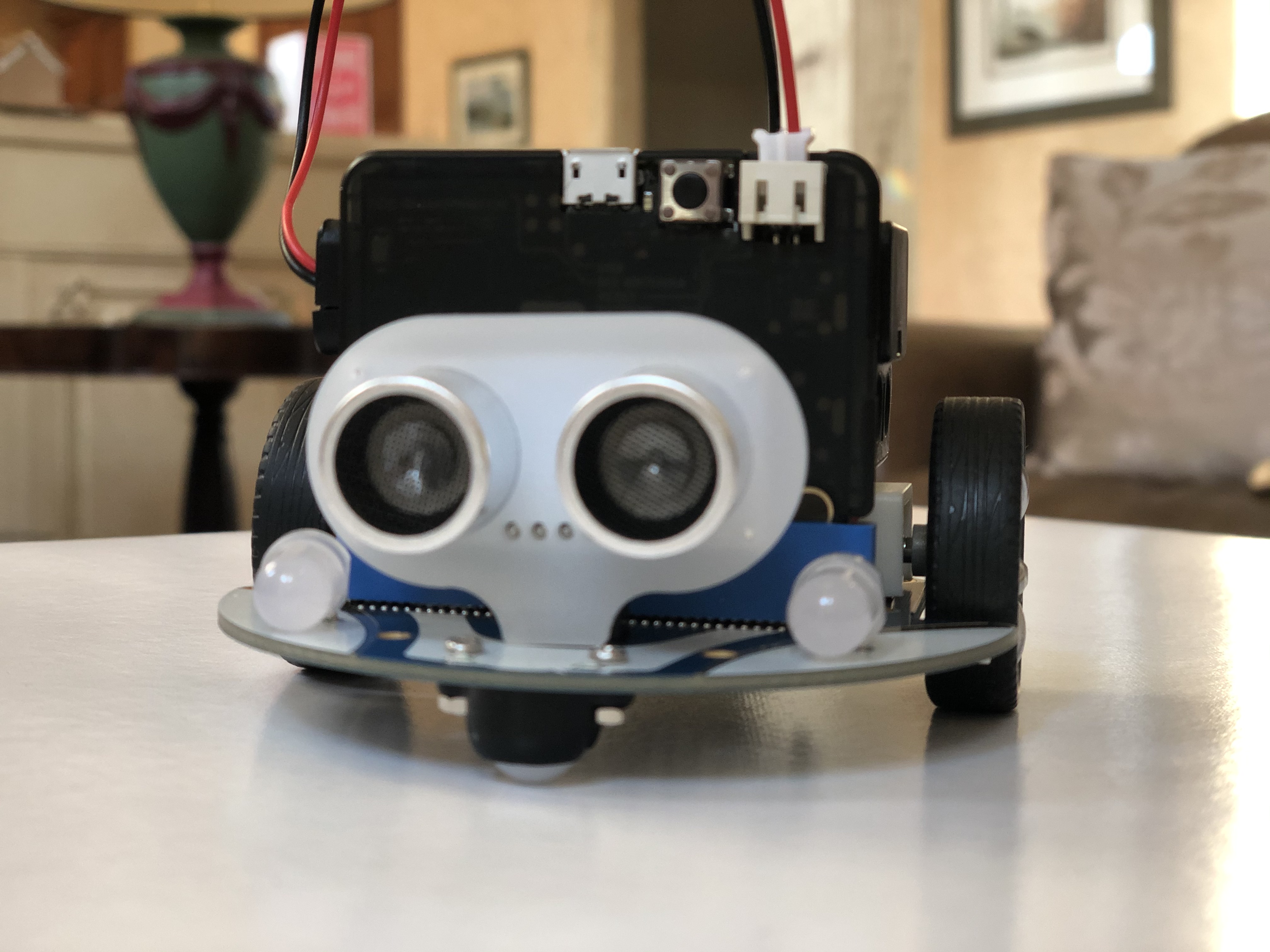
Natural disasters are one of many unavoidable occurrences that can lead to drastic tragedies among humans. Rather it be tsunamis, tornados, or volcanic eruptions, their effects can be life changing for many innocent people. One of the most common yet most impactful disasters is an earthquake. While in some mild cases all they cause are some glass accidents or books sliding off of shelves, the more lethal side of earthquakes is extremely dangerous. This is why the Rubble Rescue bot was made. The robot design is based on the Elecfreaks Cutebot model. It utilizes the Micro:bit mini-computer to control its movements without the direct control of humans. Using the Microsoft MakeCode website, the Rubble Rescue Bot was block-coded to avoid obstacles with ultrasonic sensors and move toward sound. An extra arm was made so that it could pick up people while minimizing the movement to their injury. These features are significant because if the robot was sized up, it could avoid or remove obstacles and save lives in dangerous areas without requiring people to risk injury for the rescue. The robot currently does not have any cameras or features able to send images of the scene back to people who are monitoring the dangerous situation after an earthquake due to its small size and low cost. It also cannot climb buildings or obstacles in its way because of the wheel structure. These are features which would be implemented later if this robot was to be used, like with wheels similar to tractor wheels for more friction so that the robot can climb and an attachment of a wireless camera.Bibliography/Citations:
"Earthquakes." Environmental Science: In Context, edited by Brenda Wilmoth Lerner and K. Lee Lerner, vol. 1, Gale, 2009, pp. 218-223. In Context Series. Gale eBooks, link.gale.com/apps/doc/CX3233900075/GVRL?u=prin21754&sid=GVRL&xid=18cb9980. Accessed 7 Mar. 2021.
Dautenhahn, Kerstin. “Socially intelligent robots: dimensions of human-robot interaction.” Philosophical transactions of the Royal Society of London. Series B, Biological sciences vol. 362,1480 (2007): 679-704. doi:10.1098/rstb.2006.2004
“HyQ2Max: The Robot You Can't Keep Down.” REUTERS. History Research Center, online.infobase.com/Auth/Index?aid=&itemid=&reutersId=251952. Accessed 7 Mar. 2021.
MathWorks. "What Is SLAM? 3 things you need to know." MathWorks, . www.mathworks.com/discovery/slam.html. Accessed 7 Mar. 2021.
Zeldovich, Lina. "These Rescue Robots Can Tackle Almost Any Disaster, Part 2." ASME, The American Society of Mechanical Engineers, 22 Feb. 2019, www.asme.org/topics-resources/content/rescue-robots-can-tackle-almost-any-disaster-part. Accessed 7 Mar. 2021.
Zhao, Jingchao et al. “A Search-and-Rescue Robot System for Remotely Sensing the Underground Coal Mine Environment.” Sensors (Basel, Switzerland) vol. 17,10 2426. 23 Oct. 2017, doi:10.3390/s17102426
Additional Project Information
{kind=link}
Project files
Research Plan:
First, I will conduct some preliminary research on existing robot models and rescue robots. I will also look at natural disaster statistics and other situational research. I will buy the materials needed and code a program which makes the robot move/sense its surroundings. These materials include: Elecfreaks CuteBot set, Micro Bit set, and an adapter according to the computer you are using to code. Also make sure to have the AAA batteries used to power the robot. The ElecFreaks set will come with an ultrasonic sensor as well as wheels. Once I have this robot, I will put in the batteries. Next, I will put the batteries inside the rectangular battery case connected to the Micro Bit and put the MicroBit in the robot slot. Then, I will write the code for the robot. I will connect the Micro:bit to my computer with an adapter and upload my code to it, then test it in an obstacle course that I will make.
Questions and Answers
1. What was the major objective of your project and what was your plan to achieve it?
a. Was that goal the result of any specific situation, experience, or problem you encountered?
The major objective of my robot is to save people who have been put in dangerous situations by earthquakes. It is designed to be able to navigate through environments with many obstacles, and then to save a person and deliver them to safety. I participated in a robotics team at my school, and last year we were challenged to use a robot to solve a problem within our community. For this year’s project, instead of solving a problem in a specific community, this robot is designed to save people who are trapped by earthquakes world wide.
b. Were you trying to solve a problem, answer a question, or test a hypothesis?
The problem that the robot is trying to solve is an issue regarding earthquakes. When earthquakes happen, people are often injured and put into difficult situations they cannot extricate themselves from. This robot is supposed to navigate through rubble and debris and locate trapped people, and then deliver them to safety.
2. What were the major tasks you had to perform in order to complete your project?
The major tasks that needed to be completed were programming the robot to move, to be able to navigate through obstacles, and to create an “arm” which the robot could use to save people.
3. What is new or novel about your project?
a. Is there some aspect of your project's objective, or how you achieved it that you haven't done before?
I have never assembled my own robot before doing this project. Before when I did work with robots, they were already assembled and part of my school’s resources.
b. Is your project's objective, or the way you implemented it, different from anything you have seen?
Other earthquake related inventions I have seen have included beds that can turn into protective cases or machinery that can predict them. I have not yet seen an invention that targets victims of earthquakes trapped in rubble/the remains of buildings.
c. If you believe your work to be unique in some way, what research have you done to confirm that it is?
N/A.
4. What was the most challenging part of completing your project?
a. What problems did you encounter, and how did you overcome them?
The most challenging part was figuring out all the materials the robot would need and how to assemble them. A problem was that many sets of supplies did not end up coming with all the supplies that were needed. The separate supplies were then bought individually according to what was needed.
b. What did you learn from overcoming these problems?
I learned all the parts that a robot would need in order to function as intended.
5. If you were going to do this project again, are there any things you would do differently the next time?
I would start the project earlier, as well as look deeper in everything needed for the project, and buy all the materials at the same time accordingly.
6. Did working on this project give you any ideas for other projects?
Assembling and coding a robot gave me more ideas on how I could use robots in the future, as well as the MicroBit coding platform.
7. How did COVID-19 affect the completion of your project?
Covid-19 led to a lack of supplies. I was unable to receive supplies from any other source other than directly from Amazon, which led to a budget and a limit based on the amount of time I had.