
A Novel Approach to Single Tube Irrigation System with Adaptive Water Control
Abstract:
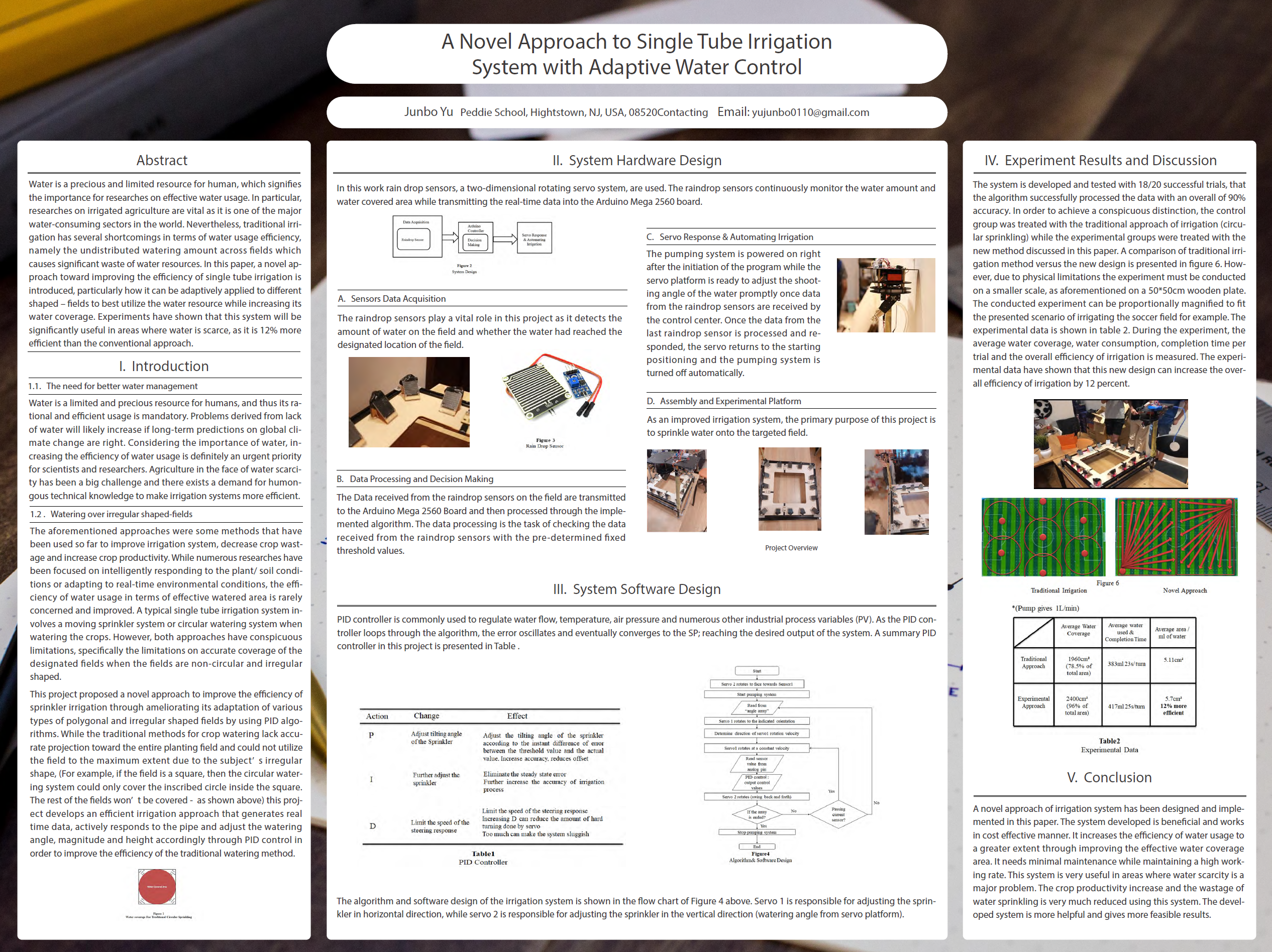
Water is a precious and limited resource for human, which signifies the importance for researches on effective water usage. In particular, researches on irrigated agriculture are vital as it is one of the major water-consuming sectors in the world. Nevertheless, traditional irrigation has several shortcomings in terms of water usage efficiency, namely the undistributed watering amount across fields which causes significant waste of water resources. In this paper, a novel approach toward improving the efficiency of single tube irrigation is introduced, particularly how it can be adaptively applied to different shaped – fields to best utilize the water resource while increasing its water coverage. Experiments have shown that this system will be significantly useful in areas where water is scarce, as it is 12% more efficient than the conventional approach.
Bibliography/Citations:
No additional citationsAdditional Project Information
Project files
Research Plan:
Junbo Yu Research Plan
- Rationale:
Water is a limited and precious resource for humans, and thus its rational and efficient usage is mandatory. Problems derived from lack of water will likely increase if long-term predictions on global climate change are right. Meteorological records suggest significant increases in temperature and decreases in annual precipitation, which will entail a reduction of the available water resources of the XXI century. Industry and tourism, among other productive activities, compete for this resource increasing its profitability and productivity. Nowadays, the economic sector that most fresh water consumes is agriculture: ca. 70% of the total resources, against the 20% used by industry and the 10% for domestic use (UN, 2009). In addition, considering the expected increase in world population (UN, 2008), it is urgent to find solutions to ensure enough food supply. This can be only achieved by increasing the world agricultural yield and water productivity, mainly from the irrigated areas as suggested by the aforementioned data.
Considering the importance of water, increasing the efficiency of water usage is undoubtedly an urgent priority for scientists and researchers. Agriculture in the face of water scarcity has been a big challenge and there exists a demand for humongous technical knowledge to make irrigation systems more efficient.
- Research Questions, Hypothesis, Engineering Goals, Expected Outcomes:
While numerous researches have been focused on intelligently responding to the plant/ soil conditions or adapting to real-time environmental conditions, the efficiency of water usage in terms of effective watered area is rarely concerned and improved. A typical single tube irrigation system involves a moving sprinkler system or circular watering system when watering the crops. However, both approaches have conspicuous limitations, specifically the limitations on accurate coverage of the designated fields when the fields are non-circular and irregular shaped.
This project proposed a novel approach to improve the efficiency of sprinkler irrigation through ameliorating its adaptation of various types of polygonal and irregular shaped fields by using PID algorithms. While the traditional methods for crop watering lack accurate projection toward the entire planting field and could not utilize the field to the maximum extent due to the subject’s irregular shape, (For example, if the field is a square, then the circular watering system could only cover the inscribed circle inside the square. The rest of the fields won’t be covered - as shown above) this project develops an efficient irrigation approach that generates real time data, actively responds to the pipe and adjust the watering angle, magnitude and height accordingly through PID control in order to improve the efficiency of the traditional watering method.
- Details:
- Procedures:
- In this work rain drop sensors, a two-dimensional rotating servo system, are used. The raindrop sensors continuously monitor the water amount and water covered area while transmitting the real-time data into the Arduino Mega 2560 board. The raindrop sensors are positioned in such a way to outline the field so that the sprinkler will follow the contour of the target outlined by the sensors. When the data from raindrop sensors are received, the decision making is done by the algorithm implemented to automatically adjust the sprinkler direction. The sprinkler’s horizontal and vertical shooting angle is determined by the amount of water each raindrop sensor receives. This method is significantly effective when watering an irregular or polygonal shaped field.
- Sensors Data Acquisition
The raindrop sensors play a vital role in this project as it detects the amount of water on the field and whether the water had reached the designated location of the field. The sensor is interfaced with Arduino mega board and programmed. Once it is programmed the sensors are placed onto the test field and secured with hot glue. T The raindrop sensor feedbacks a value between 0 and 1023, as 1023 indicate the absence of water and 0 indicates that the sensor is doused with water.
-
- Servo Response & Automating Irrigation
The pumping system is powered on right after the initiation of the program while the servo platform is ready to adjust the shooting angle of the water promptly once data from the raindrop sensors are received by the control center. Once the data from the last raindrop sensor is processed and responded, the servo returns to the starting positioning and the pumping system is turned off automatically.
-
- Overall Assembly
As an improved irrigation system, the primary purpose of this project is to sprinkle water onto the targeted field. Although the real-life application would be realistic farmlands; due to spatial limitations the farm field in the model is a shrunken version. A 50cm * 50 cm wooden plate is inlayed into the main platform made from black aluminum T slot bars and cast-iron hinges. Sixteen raindrop sensors are attached onto the wooden plate, which are also connected with the Arduino Mega 2560 board through a bread board. The positioning of the raindrop sensors forms the outline of the targeted field, which in this case is a square. On one vertex of the main platform stands a black aluminum T slot bar that carried the servo platform. Situating at a height of x cm, the servo platform connects the pipeline and is programmed to adjust the watering angle and horizontal rotating direction of the sprinkler by using two servos, according to the implemented PID control and the response from raindrop sensors.
- Risk and Safety
- Be aware of the presence of electricity used in this project
- Always wear safety goggles for any work
- Be extremely cautious when handling water and electricity at the same time
- Data Analysis
- Data Processing and Decision Making
The Data received from the raindrop sensors on the field are transmitted to the Arduino Mega 2560 Board and then processed through the implemented algorithm. The data processing is the task of checking the data received from the raindrop sensors with the pre-determined fixed threshold values.
The threshold value is 500 after considering the optimal conditions for watering effects and fair experimental results. The servo platform will keep turning and adjusting its watering angle if the value falls below the threshold, or remain on the current position if the value is above. The response time is very short considering the necessity for accuracy when outlining the contour of the field.
-
- Software Design
Servo 1 is responsible for adjusting the sprinkler in horizontal direction, while servo 2 is responsible for adjusting the sprinkler in the vertical direction (watering angle from servo platform).
As the program starts, servo 2 rotates to face the first raindrop sensor that was preprogrammed in the algorithm. (The position of sensor 1 is set) Meanwhile, the pumping system starts to pump water into the pipe. Next, servo 1 rotates toward the indicated orientation that’s pre-determined from the array list. As the pipe sprinkles water onto the plate, the raindrop sensors help to ensure that the water stays within the outline of the field while feeding back values to the control center.
Reading the values from the sensor, the PID controller adjusts the output of the servos accordingly by swinging servo 2 back and forth so that it traces the outline of the field arranged by the raindrop sensors.
If there are remaining array values, then the system proceeds onto the next value, repeat the aforementioned process according to the new angle and respective output values controlled by the PID controller.
Finally, when all the angle values in the array list have been processed, the pumping system will be shut off and the irrigating process is complete.
*The shape encircled by the sensor is the shape of farmland in the real life application.
- Bibliography:
[1] Bjorneberg D.L , IRRIGATION | Methods, Reference Module in Earth Systems and Environmental Sciences, Elsevier, 2013. 11-Sep-13 doi: 10.1016/B978-0-12-409548-9.05195-2.
[2] Isa.org. (2019). Automation Basics: P, I, and D together, separately control the process - ISA. [online] Available at: https://www.isa.org/standards-and-publications/isa-publications/intech-magazine/2009/june/automation-basics-pi-and-d-together-separately-control-the-process/
[Accessed 26 Jul. 2019].
[3] Navarro-Hellín, H., Martínez-del-Rincon, J., Domingo-Miguel, R., Soto-Valles, F. and Torres-Sánchez, R. (2019). A decision support system for managing irrigation in agriculture.
https://www.sciencedirect.com/science/article/pii/S016816991630117X
[4] Ieeexplore.ieee.org. (2019). Wireless sensor and actuator system for smart irrigation on the cloud - IEEE Conference Publication. [online] Available at: https://ieeexplore.ieee.org/abstract/document/7389138 [Accessed 2 Nov. 2019]. https://ieeexplore.ieee.org/abstract/document/7389138
[5] Ieeexplore.ieee.org. (2019). Smart irrigation: A smart drip irrigation system using cloud, android and data mining - IEEE Conference Publication. [online] Available at: https://ieeexplore.ieee.org/abstract/document/7942589 [Accessed 2 Nov. 2019]. https://ieeexplore.ieee.org/abstract/document/7942589
[6] Ieeexplore.ieee.org. (2019). IOT based crop-field monitoring and irrigation automation - IEEE Conference Publication. [online] Available at: https://ieeexplore.ieee.org/abstract/document/7726900 [Accessed 2 Nov. 2019]. https://ieeexplore.ieee.org/abstract/document/7726900
[7] Goodchild, M.S., Jenkins, M.D., Whalley, W.R. and Watts, C.W. (2018). A novel dielectric tensiometer enabling precision PID-based irrigation control of polytunnel-grown strawberries in coir. Biosystems Engineering, [online] 165, pp.70–76
[Accessed 2 Nov. 2019].
https://www.sciencedirect.com/science/article/pii/S1537511017302349
[8] Romero, R., Muriel, J.L., García, I. and Muñoz de la Peña, D. (2012). Research on automatic irrigation control: State of the art and recent results. Agricultural Water Management, [online] 114, pp.59–66. [Accessed 2 Nov. 2019].
https://www.sciencedirect.com/science/article/abs/pii/S0378377412001746
[9]Love, J., 2007. Process Automation Handbook: A Guide to Theory and Practice. Springer-Verlag, pp. 155–171.