
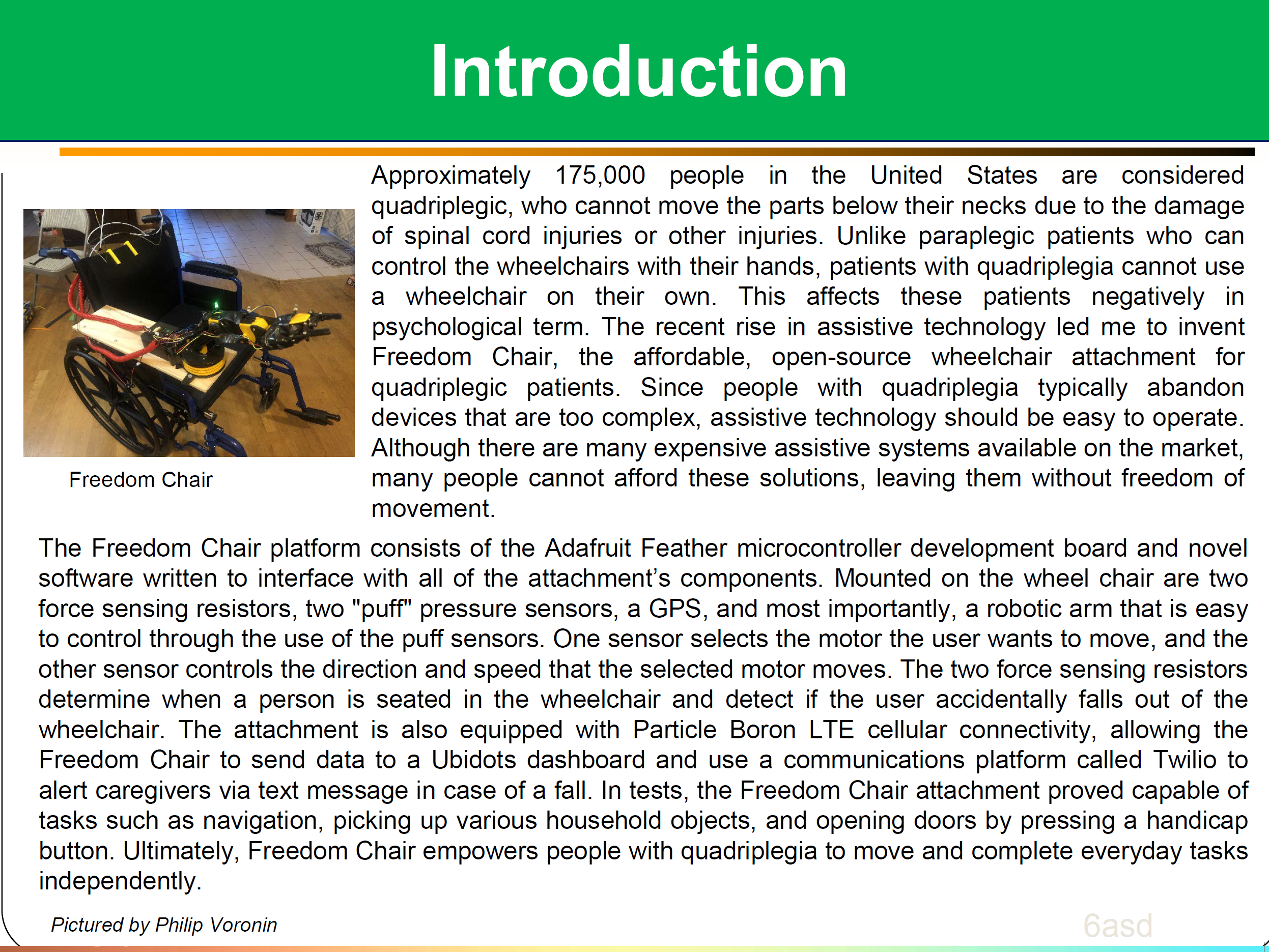
Freedom Chair
Abstract:
Abstract: Approximately 175,000 people in the United States are consideredquadriplegic.[1] Consequently, a staggering amount of people suffer from an extreme loss of independence and freedom to do daily tasks such as picking up light objects, pushing buttons, and feeding themselves. The recent rise in assistive technology [2] led me to conclude that affordable, open-source, and easily manufactural assistive technology should be available to people who are quadriplegic. Since people with quadriplegia typically abandon devices that are too complex, assistive technology should be easy to operate. Although there are many expensive assistive systems available on the market,[3] many people cannot afford these solutions, leaving them without freedom of movement.
To solve this problem I invented Freedom Chair, an assistive, low cost, open-sourcewheelchair attachment. The Freedom Chair platform consists of the Adafruit Feathermicrocontroller development board and novel software written to interface with all of theattachment’s components. Mounted on the wheel chair are two force sensing resistors, two "puff" pressure sensors, a GPS, and most importantly, a robotic arm that is easy to control through the use of the puff sensors. One sensor selects the motor the user wants to move, and the other sensor controls the direction and speed that the selected motor moves. The two force sensing resistors determine when a person is seated in the wheelchair and detect if the user accidentally falls out of the wheelchair. The attachment is also equipped with Particle Boron LTE cellular connectivity, allowing the Freedom Chair to send data to a Ubibots dashboard and use a communications platform called Twilio to alert caregivers via text message in case of a fall. In tests, the Freedom Chair attachment proved capable of tasks such as navigation, picking up various household objects, and opening doors by pressing a handicap button. Ultimately, Freedom Chair empowers people with quadriplegia to move and complete everyday tasks independently.
Bibliography/Citations:
No additional citationsAdditional Project Information
Research Plan:
Research Question: Can I use inexpensive and accessible hardware to build a universal wheelchair mount that allows for greater independence among quadriplegic people and is effective in safely assisting people with doing basic daily tasks?
Hypothesis: I hypothesize that the Freedom Chair wheelchair attachment will significantly improve the mobility and independence of quadriplegic patients, and that the attachment can be easily assembled and used.
Engineering Goal: While creating the Freedom Chair assistive technology for people with quadriplegia, I pursued two types of engineering goals: hardware and software. My hardware goal was to construct the wheelchair attachment as a robotic arm that could be controlled through the use of puff pressure sensors. The arm should assist with basic functions of everyday life, such as picking up objects and pushing buttons. My software goal was to interface the robotic arm with the microcontroller and direct the motor movement via the use of puff pressure sensors. My secondary software goal was to incorporate GPS location monitoring as well as a feature to sense whether the wheelchair user has fallen out of their chair.
Procedures: The individual is seated in the wheelchair and a head mount, similar to a harmonica neck brace, is placed on the user’s head. The tubes on the head mount are connected to puff sensors which measure air pressure. When someone ‘sucks’ or ‘blows’ into the tubes, the pressure value decreases or increases, allowing the user to control which motor is selected and which direction the motor moves. To become proficient in handling the robotic arm, the user can test the arm mechanism on picking up various everyday objects such as saltshakers and candy bars. In the meantime, the caregiver can check the status of their patients by logging on to their UBIdots dashboard. The dashboard displays the location of the user, as reported by the Arduino Feather GPS. The caregiver can also keep track of their patient by checking their phone to see if any notifications arrive through Twilio, alerting the caregiver that the status of the force sensors have changed and that the individual in the wheelchair might have fallen out. When the user is ready, they can visit local buildings and utilize the Freedom Chair to press the handicap buttons that automatically open doors, allowing them to experience a full range of mobility outside of their homes.
Risk Assessment
Risks: The increase in independence can result in over-extending the user’s capabilities, leading them to believe that they have more independence than the attachment actually provides. Another risk is that if the GPS stops working or the arm loses power, the user will be stuck. This is minimized by the caregiver’s user interface, which needs to be monitored at all times to make sure that the patient is still in their wheelchair and in a safe location. The last known location will always be displayed on the GPS interface in case the GPS malfunctions.
Benefits: The user has increased independence,social participation, improved self-esteem, and requires less reliance on caregivers to monitor them. The user will now be able to complete simple tasks that they could not before, such as moving small objects, feeding themselves, and writing on a piece of paper.
Expected Outcome:
The expected outcome of my trials were that the user would continue to become more comfortable with the device on their wheelchair, and as they became more familiar with the operation, the independence to do basic tasks by themselves would increase significantly.
Bibliography:
[1]. “Spinal Cord Injury Facts and Statistics.” Sci-Info-Pages, 2002-2020 Spinal Cord Injury Information Pages, www.sci-info-pages.com/spinal-cord-injury-facts-and-statistics/.)
[2]. P. Bell, J. Hinojosa, “Perception of the Impact of Assistive Devices on Daily Life of Three Individuals with Quadriplegia.” Journal of Assistive Technology, 1995;7(2): 87-94, www.tandfonline.com/doi/abs/10.1080/10400435.1995.10132257.
[3]. J. Ripat, A. Booth, “Characteristics of Assistive Technology Service Delivery Models: Stakeholder Perspectives and Preferences.” Disabil Rehabil,2005;27(24):1461-1470. doi: 10.1080/09638280500264535 www.tandfonline.com/doi/abs/10.1080/09638280500264535.